
News
Research cruise aboard RV Oceania in March 2024 in the Baltic Sea (1-8.03.2024)Research plans:
Research cruise in May 2024 on the Black Sea
Research plans:
About the Project
Project EROVMUS aims at creating an improved interface for ROV pilots, to enable easier and more cost effective ROV deployments in missions related to dumped underwater munitions. This will include both creation of multisensory platform, and improved software solutions. Proposed activities are related to navigation improvement, introduction of autonomous identfication routines, as well as image enhancement technologies. Information from multiple sensors will be overlaid to produce an equivalent of Heads UP Display (HUD) for the pilot, reducing the number of displays needed for effective operation. In addition, Virtual Reality (VR) solutions will be investigated, to enable the use of virtual displays and combine image from multiple cameras to create large virtual display for munition identification improvement. |
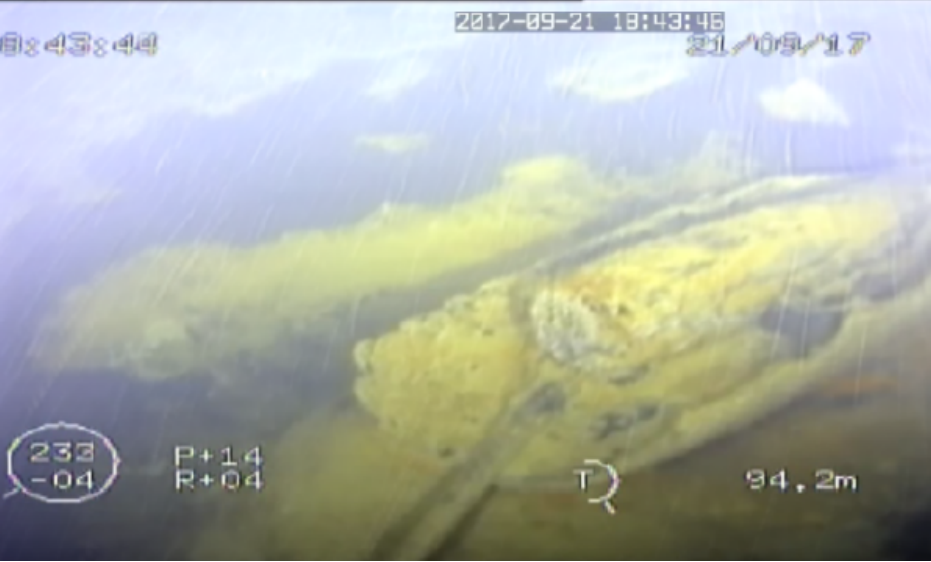
In Europe, after the end of WW2, 1.2 million tons of conventional explosive and 600 thousand tons of chemical weapons were disposed, mostly in the North Sea/Baltic Sea and in the Mediterranean Sea (e.g. see the projects CHEMSEA, MODUM, and UDEMM, see also Szarejko & Namieśnik, 2009 or Beck et al 2018) and the North Sea (see T. Messiaen & J.-P. Henriet. Chemical munition dump sites in coastal environments). Increased usage of sea bottom for offshore investments leads to exploration of areas where either unexploded ordnance (UXO) or dumped conventional and chemical munitions can be found. Environmental impact assessment procedures and safety protocols require that all munitions in the planned investment area have to be found, identified and managed. To speed up these tasks, one way is to ensure a precise handling of remote operated vehicles (ROV) used for identification of munitions and collecting environmental samples. Therfore ROV pilots need to control underwater navigation and round looking sonar to approach objects detected in acoustic and magnetometric surveys.
 |
Until now, the problem is solved by building large display arrays, showing information from available sensors and cameras, and the use of additional personnel, i.e. Navigator, video operator, to control all the sensors mounted on ROV. This is usually augmented with post processing of collected material, to improve the quality of the collected data, and draw final conclusions regarding object identification and corrosion status. As a result, ROVs require large vessels to be operated and vessels able to fit considerable control rooms and host a number of personnel needed for ROV mission control. Data post processing means, that ROV pilots are not receiving final conclusive data during the dive. That means that missions take longer time, to ensure enough data is collected. It occurs often that a dive needs to be repeated. The data quality of the recorded data is dependent on the controllability of the ROV with mounted sensors. The standardization of the maneuvers during recording can contribute to the standardization of the image layout. A standard image recording procedure can contribute in comparing images and hence to the image processing and pattern recognition. This approach should also help to make faster and more accurate decision and speed up the operations.
 www.offshore-energy.biz |
The aim of this project is to streamline ROV operations in munition affected areas, by providing better interfaces for ROV pilots. This includes both software and hardware solutions that integrate information from multiple sensors into one view, and provide online image processing capability, to enable ROV pilots to identify munitions and their status in real time.
The overall goal and expected results are:
- Develop new multisensory platform for ROV operations in dumped munition areas by combining round looking sonar, front looking sonar and multiple video cameras with online image correction, as well as non-coaxial lighting. Expected results: Concepts and demonstrators of ROV vehicles equipped by a new multiple sensor combination for optical and acoustic characterization of munitions.
- Provide an image overlay of navigational data, including targets from acoustic survey and sonar targets as an augmented reality for ROV pilot. Expected results: Software for combination of navigational data from USBL based systems, sonar data and map data in one screen, used in real-time by the ROV pilot.
- Develop a virtual reality environment for the ROV pilot, in which the use of all multisensory equipment will be available, without a large display array.
- Develop hybrid control algorithms for task based control of the ROV based on physics models driven by data from sensors and enriched with black box models parameterized through learning from historical data.